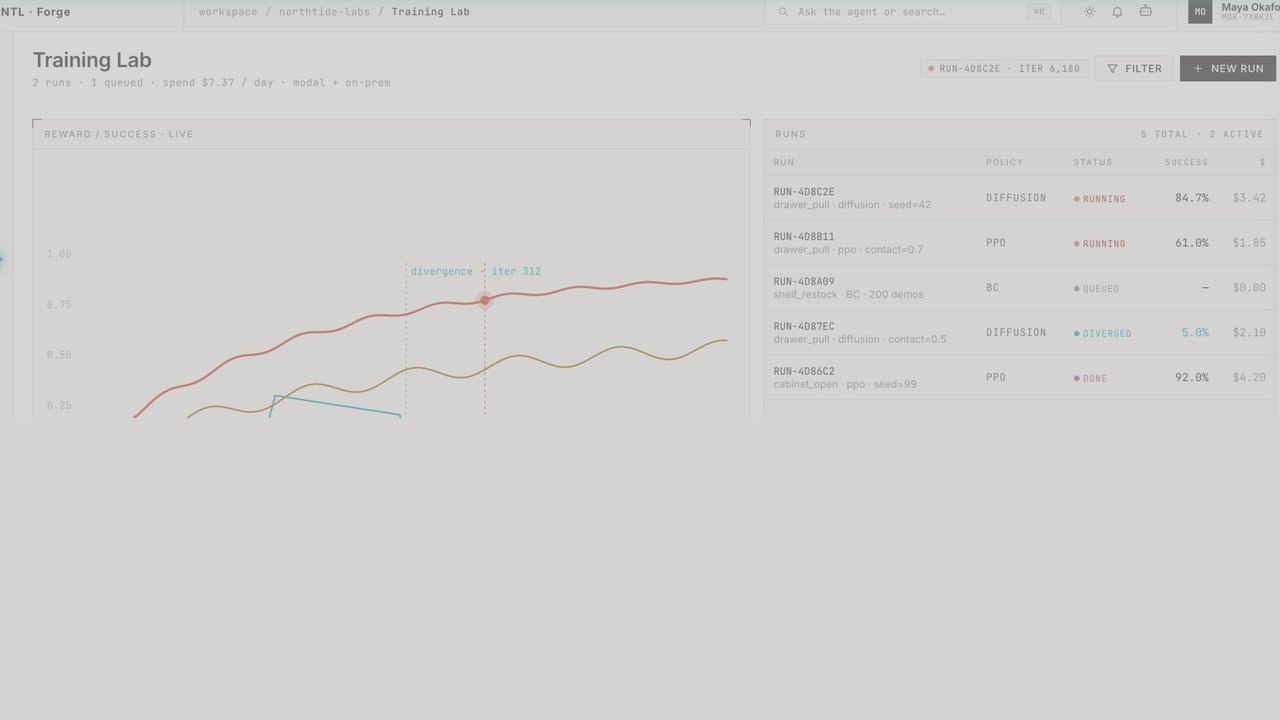
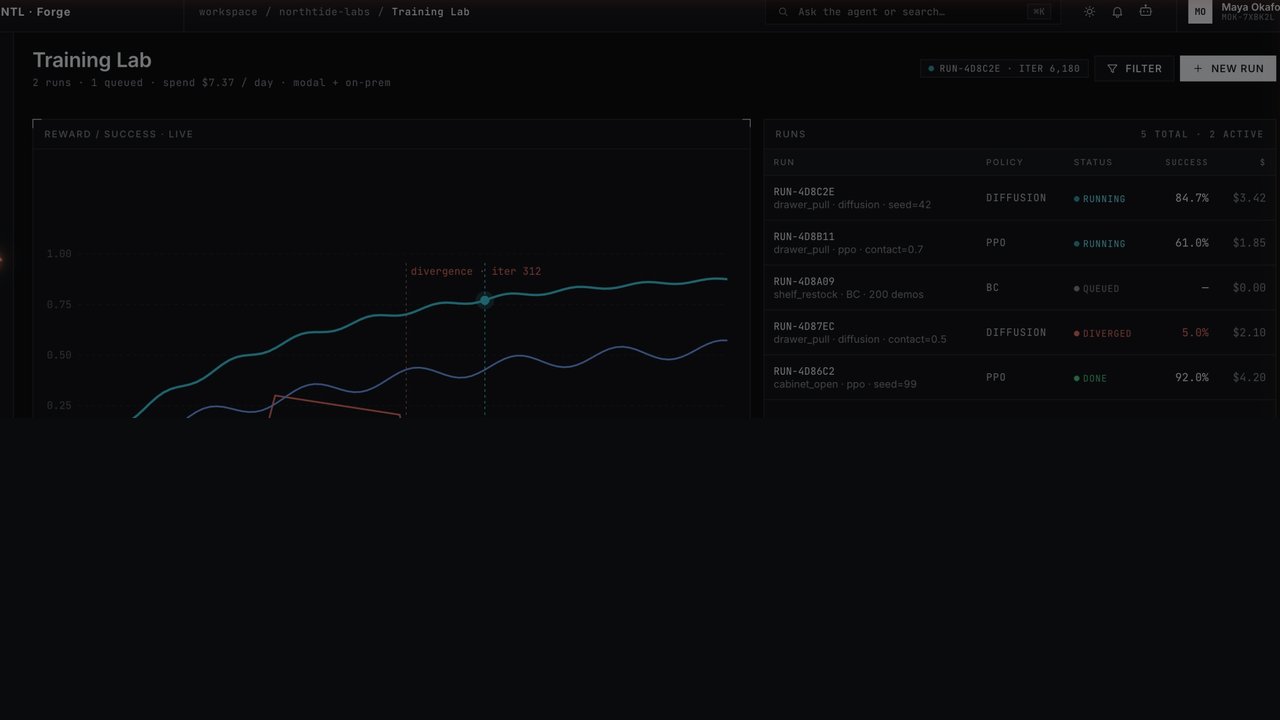
The synthetic world and the real world need to be in sync.
Physical AI is reshaping every industry the way software did. The models are getting there. The data is growing. But all of it is built on pixels that capture appearance, and on synthetic data with approximate physics. Both fail the moment real hardware enters the picture.
It’s not a perception problem. It’s a physics fidelity problem. We are building infrastructure that gives Physical AI validated and persistent physical grounding: physics that is measured, versioned, and corrected across every deployment.
We have three goals: Capture reality, build memory and close the loop with the real world.